講義3-2:スケルトン法でキャラクターを動かす仕組み
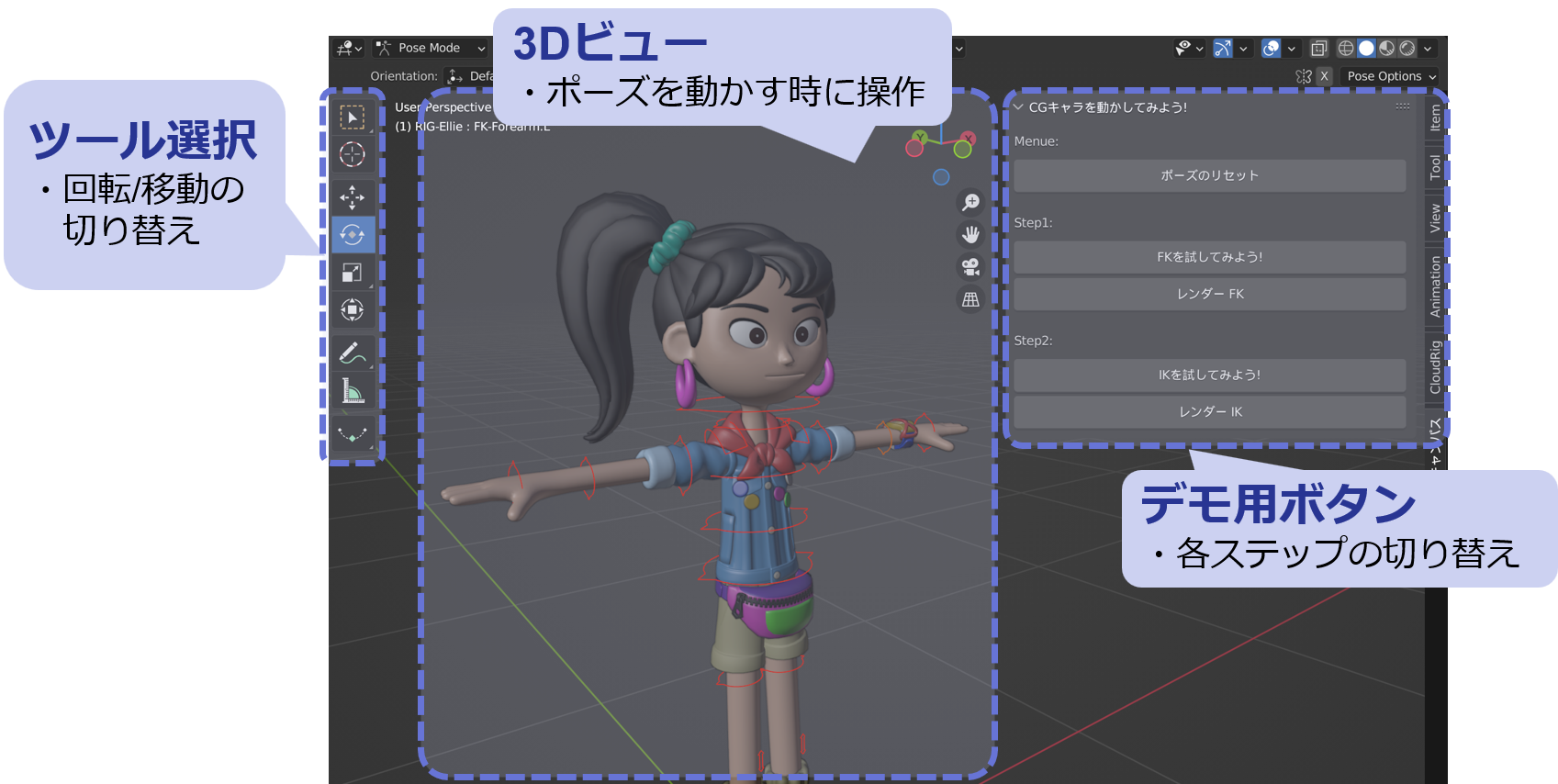
キャラクターを動かす仕組みを体験してみましょう.
以下のファイルをダウンロードしてください.
スケルトン法
スケルトンは,3DCGでキャラクターを動かすための骨組みです.
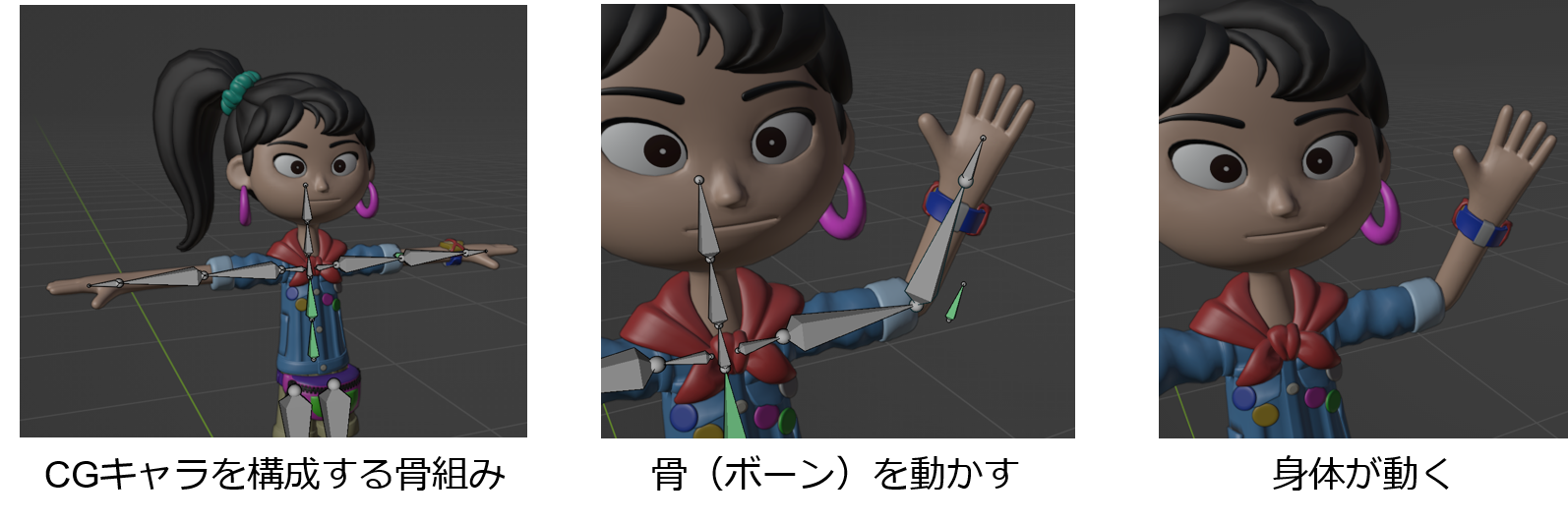
現実世界の自分の身体の骨組みをイメージすると良いかもしれません.
ヒトの身体も骨・関節で構成されていて,肘などの関節を曲げて動かすと身体もついて動きます.
CGキャラクターにも予め身体の中に骨組みがデザインされていて,骨(ボーン)を動かすとそれに合わせて身体が動きます.
FK (フォワード・キネマティクス)
FKの概要
FKは日本語では順運動学と呼ばれ,関節の角度から最終的な姿勢を得る考え方です.
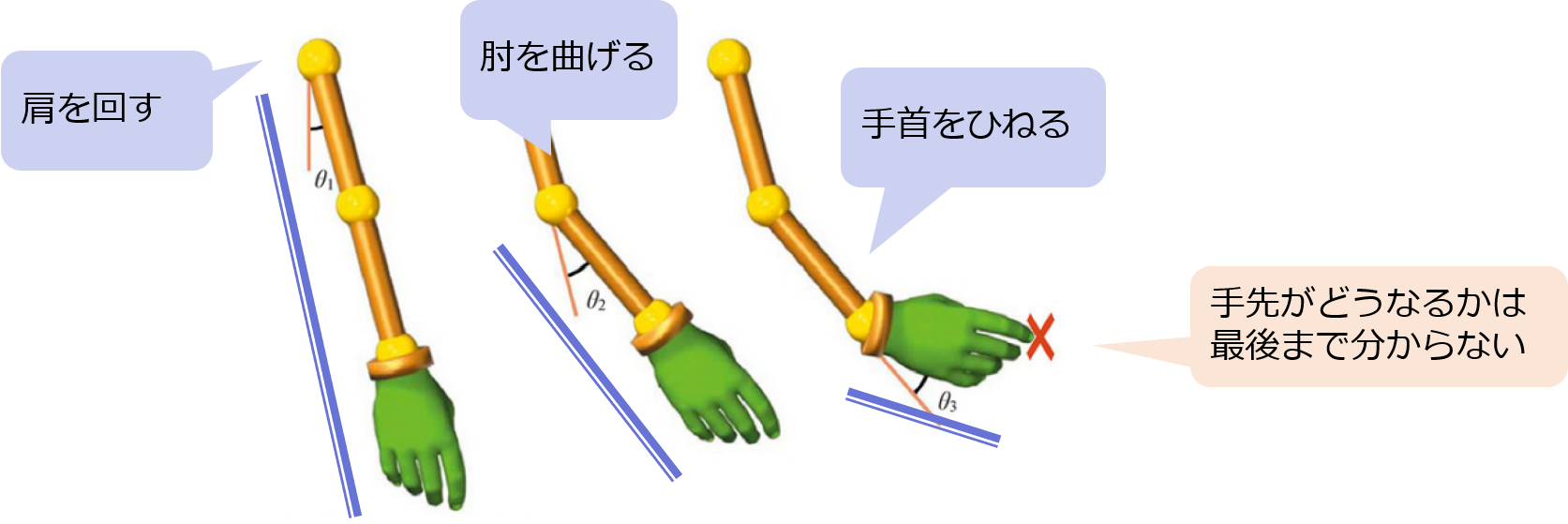
腕を曲げた時に各関節の動きがつながっていくイメージで,
- 肩を回す
- 肘を曲げる
- 手首をひねる
の全ての動作で腕全体の姿勢が決まります.
参考: ロボット工学の分野におけるFKの考え方
3DCG: FKによるポージング
FKによる姿勢制御は,3DCGのポージング,モーション付けの基本になります.
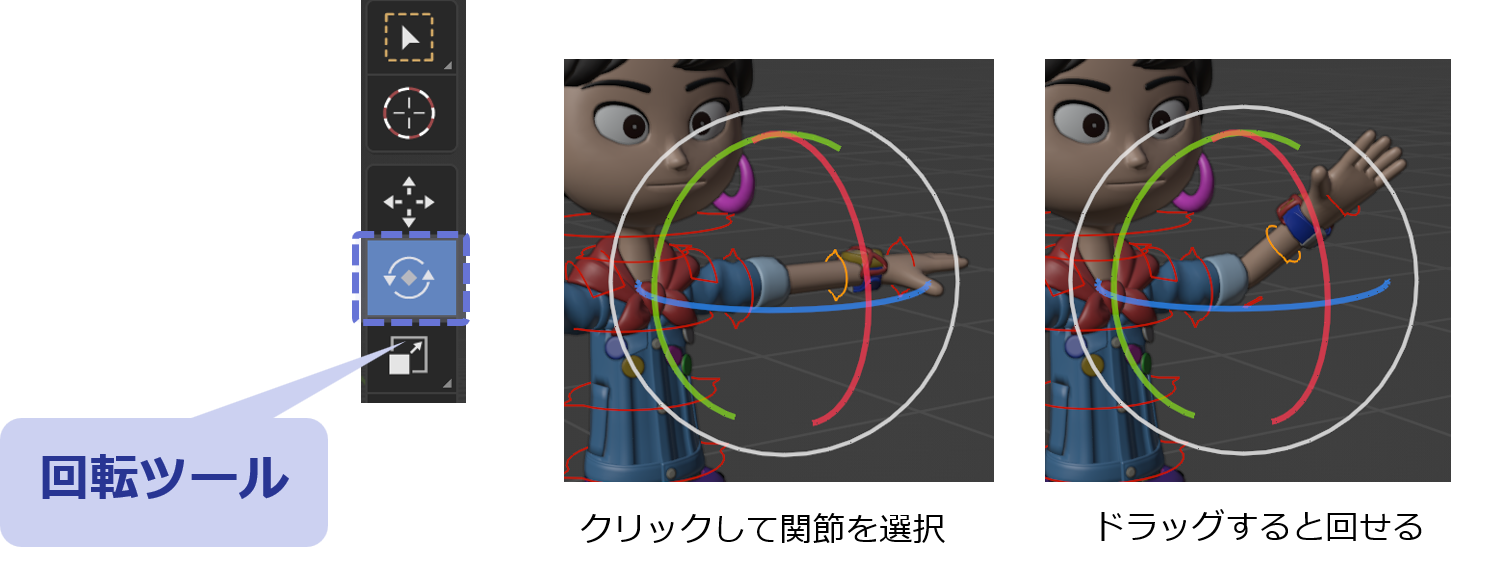
各関節の角度を回転ツールでデザインすることにより, キャラクターをポージング付けします.
仕組みとしても,各関節を何度回したかを覚えておけば良いのでシンプルです.
IK (インバース・キネマティクス)
IKの概要
IKは日本語では逆運動学と呼ばれ,最終的な姿勢から各関節の角度を得る考え方です.
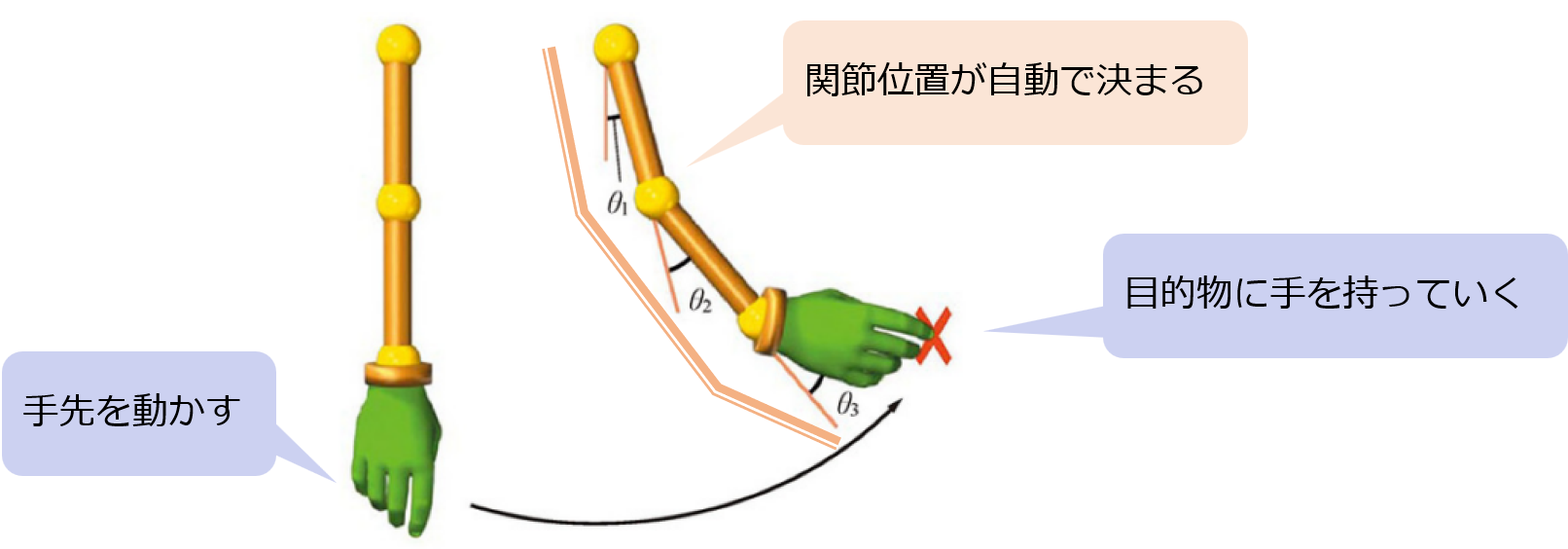
ものをつかみにいくイメージで,
- 手の先を目的物に持っていく
- 各関節の角度が自動的に決まる
- 肩をどのくらい回すか?
- 肘をどのくらい曲げるか?
- 手首をどのくらいひねるか?
普段,関節角を意識しなくても自然にものをつかむ動作をすることができると思います.
3DCG: IKによるポージング
3DCG側でもIKによるポージングが使われています.
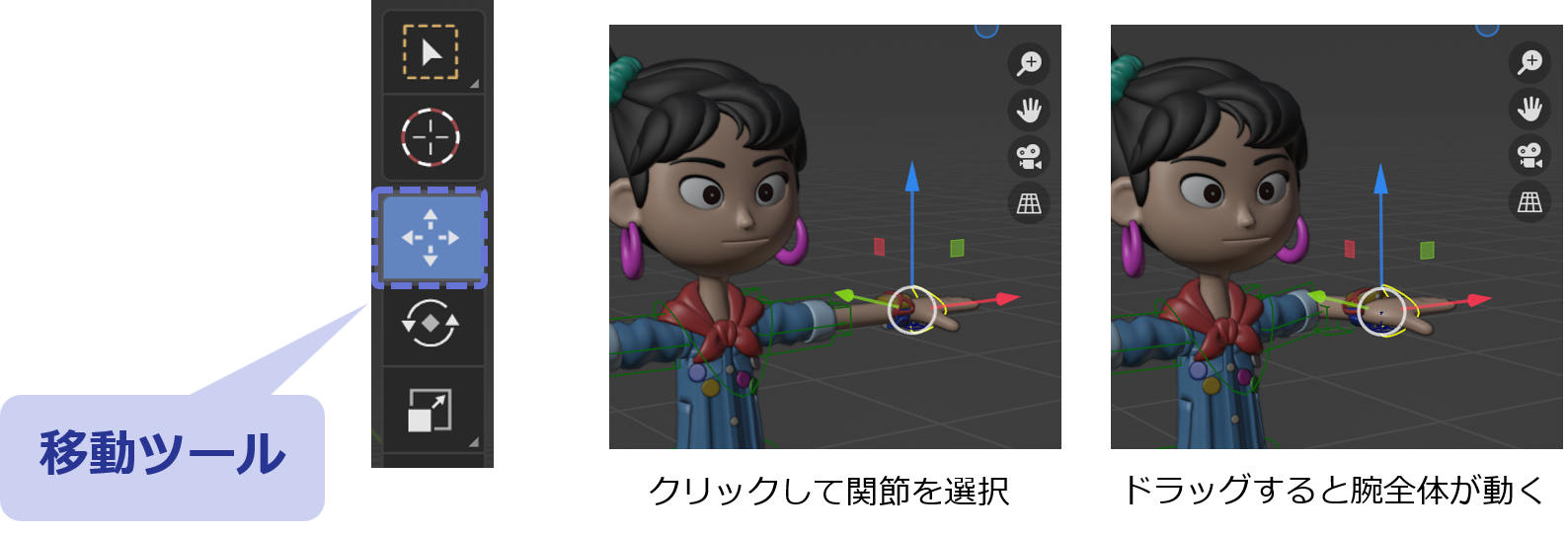
IKでは,最終的な目標位置を移動ツールで指定して各関節の角度を復元します.
- 例えば,手首の位置にIKが設定されている場合,それを動かすと腕全体が動きます.
※ FKに比べてIKの計算は複雑です.
- 手首の位置が決まっても肩の回し方・肘の曲げ方のバリエーションは複数あります.
- IKでは各関節の角度を復元するので,IK ⇒ FKの表現を計算していることになります.